Air Frame Overview
For our UAV frame, we are evaluating two designs: a hexacopter and a quadcopter. Both systems utilize a Pixhawk 6C flight controller and 2 x 6S 25Ah LiPo battery in parallel, ensuring consistent power and reliable flight control. The hexacopter provides increased stability and redundancy with its six-motor configuration, offering better fault tolerance and higher payload capacity, making it ideal for complex missions requiring enhanced reliability. On the other hand, the quadcopter is lighter and more energy-efficient, with simpler construction and reduced power consumption, but it lacks the redundancy of the hexacopter. Our final choice will prioritize mission reliability, safety, and compliance with competition requirements, ensuring a robust and effective UAV solution.
Hexacopter
Pros:
- Increased Stability and Redundancy – 6 motors provide better stability, and if 1 fails, the remaining five motors allow continued flight.
- Higher Payload Capacity – The extra motors enable carrying heavier payloads, making ideal for complex missions.
- Improved Control – More motors provide better control, especially in windy conditions and for precision tasks.
Cons:
- Heavier Design – The additional motors and components make the hexacopter heavier, requiring more power to fly.
- More Expensive – With more motors and parts, hexacopters are generally more costly to build and maintain.
- Limited COTS support – Many commercial off-the-shelf parts like power distribution boards and 4-in-1 ESCs are designed for quadcopters, requiring the use of separate components for extra motors, which can add complexity and cost.
Quadcopter
Pros:
- Lighter and Simpler – Fewer components make it lighter and simpler to design, build, and maintain.
- Cost-Effective – With fewer motors, quadcopters are generally cheaper to construct and maintain.
- Energy Efficient – The simpler design uses less power, leading to potentially longer flight times than a hexacopter on the same battery.
Cons:
- Less Stability – With only 4 motors, quadcopters are less stable, especially in windy conditions or during high-payload flights.
- No Redundancy – If one motors fails, the quadcopter cannot maintain stable flight, leading to a crash and inability to return home safely.
- Limited Payload Capacity – Fewer motors limit the ability to carry heavier payloads compared to hexacopters.
Design Goals
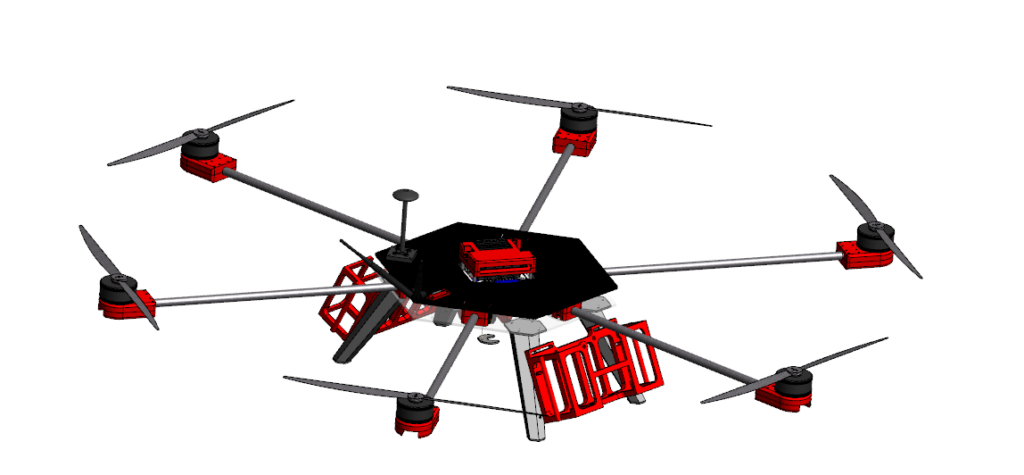
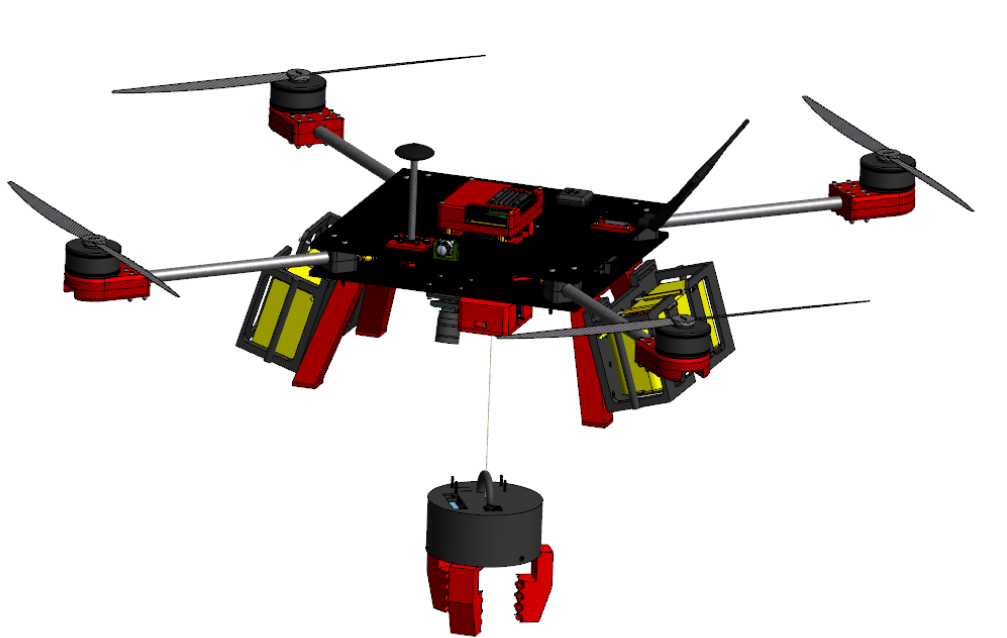
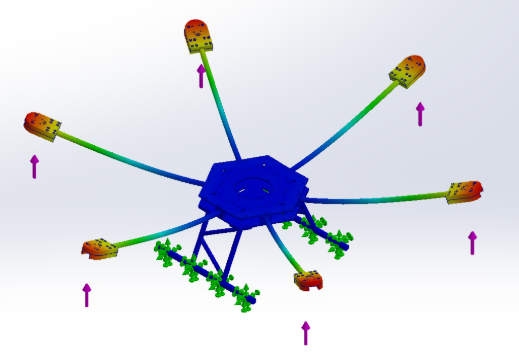
The hexacopter and quadcopter designs shown above were created in SolidWorks, guided by 4 key principles: ease of manufacturing, modularity, cost-effectiveness, and iterative refinement. Aerodynamic performance was a primary focus, leading to a sleek, streamlined shape that minimizes drag. Additionally, weight reduction was carefully considered to enhance efficiency and flight performance.
The propulsion system varied between the 2 designs, utilizing either 4 or 6 motors symmetrically positioned around the drone’s body. To maximize modularity, our team implemented an innovative approach to the body design, strategically placing holes across the frame to allow for easier component reassembly, improved cable management, and reducing overall weight. Furthermore, perforations along the landing legs enabled us to explore alternative battery placements, including side-mounted configurations, to evaluate their impact on flight dynamics. This adaptability highlights the versatility of our design.
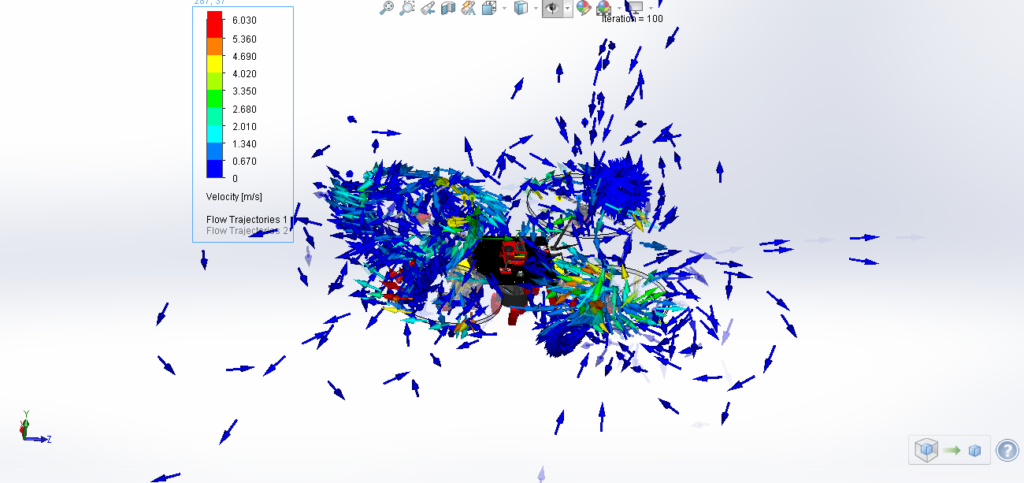
We conducted Computational Fluid Dynamics (CFD) simulations on both drones, revealing that the quadcopter design exhibited superior aerodynamic efficiency. The quadcopter showed a more uniform pressure distribution, with a mean pressure coefficient of -0.23, compared to the hexacopter’s -0.18. Thrust calculations also favored the quadcopter, with each motor producing 9.2 N at 2,500 RPM, for a total thrust of 36.8 N, offering better energy efficiency. In contrast, the hexacopter required more power, with each motor producing 9.0 N at 2,400 RPM and a total thrust of 54 N. The quadcopter demonstrated 15% better energy efficiency, reinforcing its advantages in flight stability and power consumption.
4 distinct materials were carefully selected for construction. Acrylic was chosen for the hexagonal frame due to its durability and compatibility with laser cutting. PLA was used for the landing legs, offering an optimal balance of strength, affordability, and ease of replacement. PETG was selected for the motor clamps, providing excellent impact resistance and vibration dampening. Finally, carbon fiber was employed for the arms connecting the drone body to the propellers, delivering a lightweight yet robust structure for balanced flight performance.
Legacy Drones
Our smaller “Test Drone” is a hexacopter originally from a senior design project and later modified for competing in the Midwestern Robotics Design Competition (MRDC). This design decision was mainly for redundancy, and stability as the competition mostly involved manual line-of-sight flight.
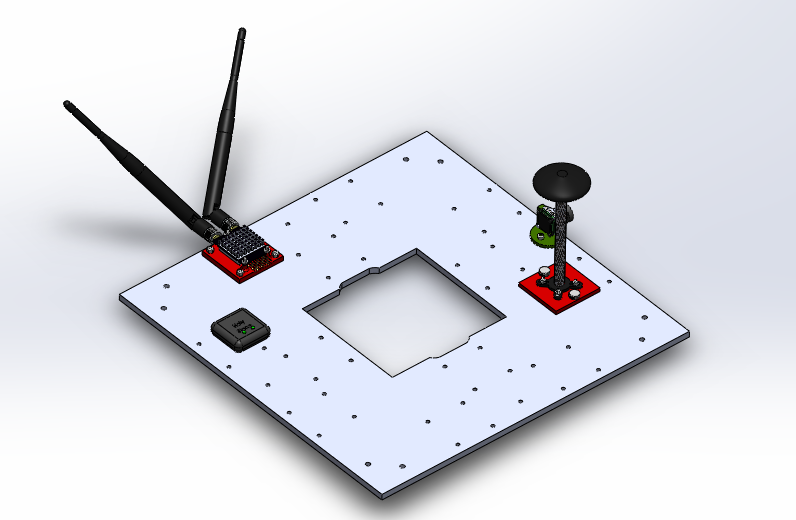
Throughout its history, it has underwent multiple modifications such as using more powerful motors, adding a top mounted battery holder, and top/bottom plates with holes for mounting accesories.

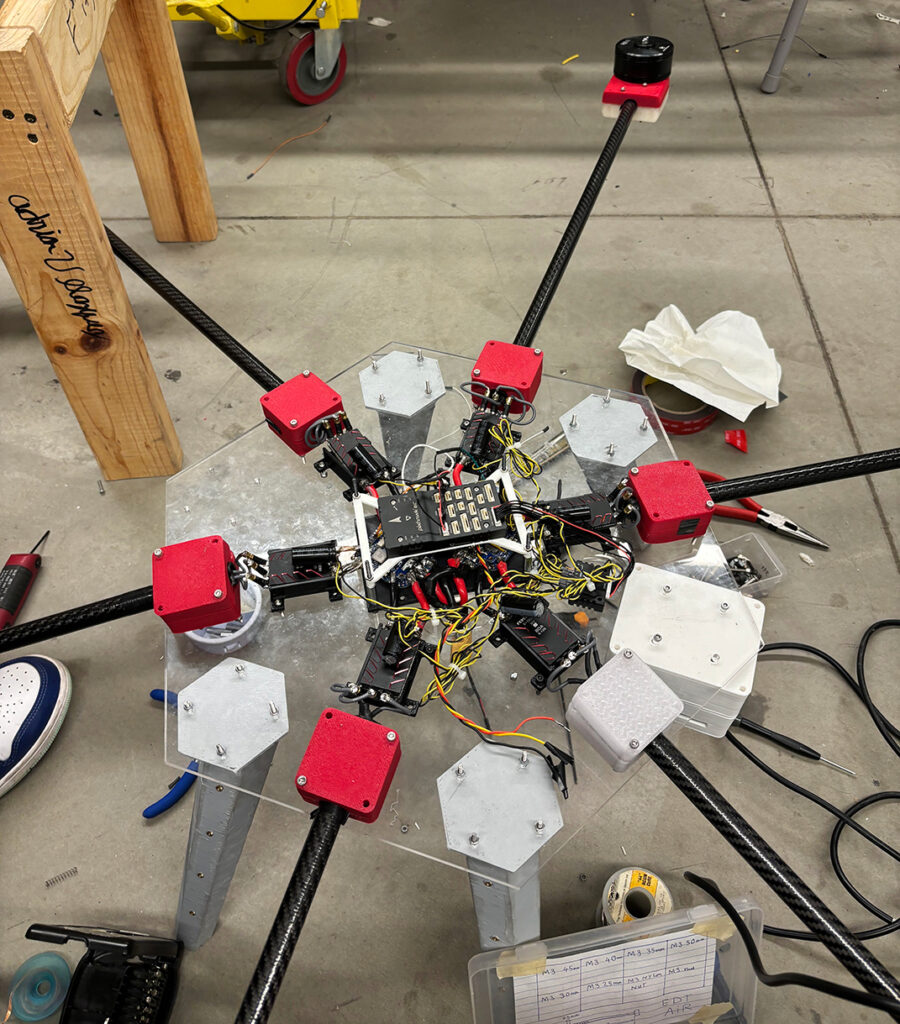
To align with the needs for the Student Unmanned Aerial Systems (SUAS) competition, we are currently using a PX4 autopilot with the ability to automatically stabilize and compensate for fluctuating conditions such as wind. Last year, we built a hexacopter “Big Drone” with larger motors, propellers, and batteries than the Test Drone to meet the flight length and range requirements. As we completed assembly, we realized the footprint of the fully assembled drone requires a large area for storage, and is too wide to fit in a typical car to transport to a testing field. Sadly, this drone was short lived. Due to damage to the power distribution board (PDB) and availability issues, along with storage space needs, we dismantled the drone and eventually decided to redesign it due to its design drawbacks.
